Robot Operating System
| Use attributes for filter ! | |
| License | BSD license |
|---|---|
| Original author(s) | Willow Garage |
| Stanford | |
| Initial release date | 2007 |
| Stable release | Morenia |
| 23 May 2018 | |
| Written in | C++ |
| Python | |
| Date of Reg. | |
| Date of Upd. | |
| ID | 404744 |
About Robot Operating System
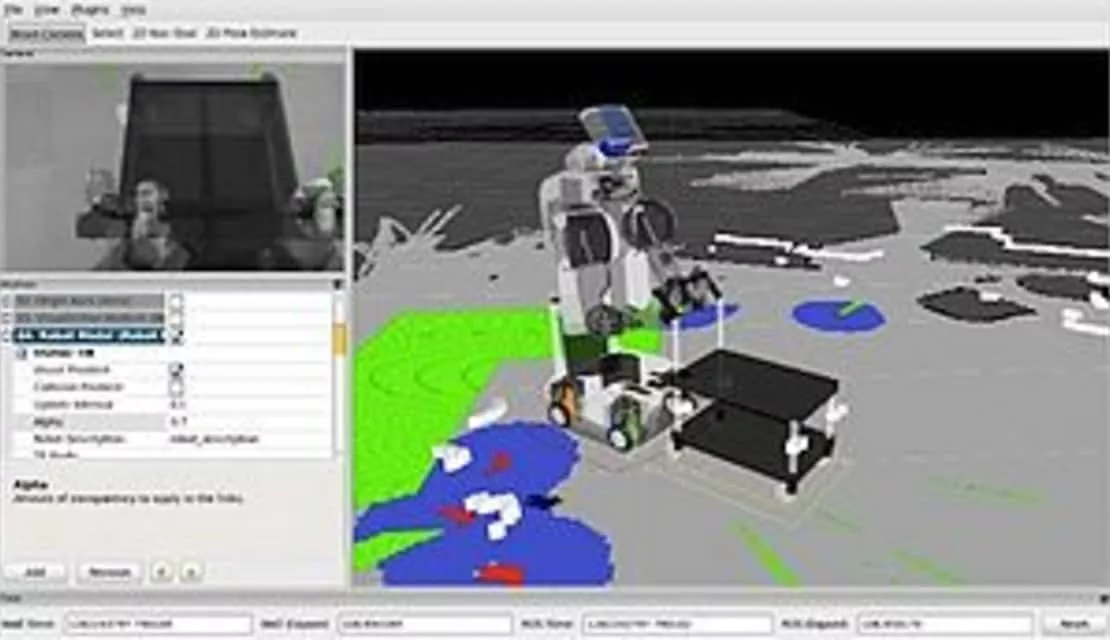
Robot Operating System is robotics middleware. Although ROS is not an operating system, it provides services designed for a heterogeneous computer cluster such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management.
Robot Operating System Photos